Hogyan működik a BMW radaros tempomatja?

A vezetést segítő biztonsági berendezések közül az ABS volt az első, a BMW K 100-as szérián jelent meg 1988-ban. Az előző mondatban azért nem írtam le az elektronika szót, mert az első ABS még egy hidraulikus rendszer volt, a és csak pár évvel később a Honda Pan Europeanben jelent meg az első elektrohidraulikus rendszer. A menetbiztonsági elektronikáknál az igazi áttörést a BMW S 1000 RR hozta el, és azóta az egész motoripar ebbe az irányba ment, mostanra már ott tartunk, hogy ezek az elektronikák félelmetesen jól működnek. A radaros tempomat pedig jó eséllyel egy új korszakot nyit meg.

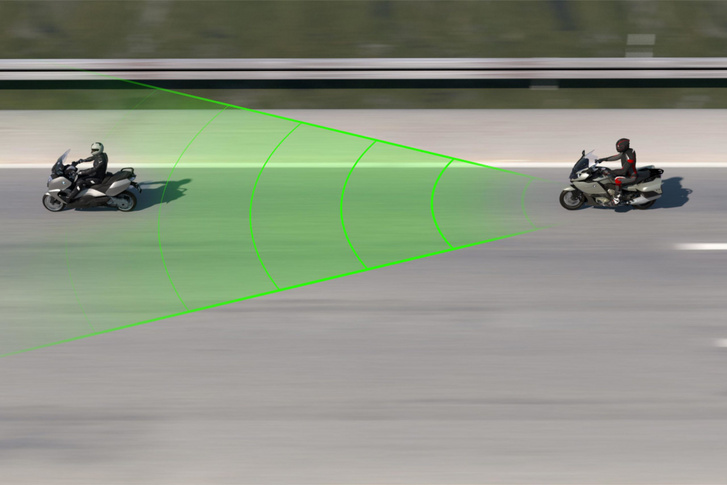
A jelenlegi biztonsági okosságok ugyanis a motor mozgásából számolnak: sebesség, váltófokozat, fordulatszám, dőlésszög, gyorsulás, kerekek forgáskülönbsége. A Bosch által fejlesztett rendszer (melyet először a BMW jelentett be, náluk ACC-nek, azaz Active Cruise Controllnak hívják, de tudjuk, hogy a KTM és a Ducati is bele fogja pakolni a jövőre érkező csúcsmodelljeibe) viszont újat fog hozni azzal, hogy az elektronikák nem csak a motor adatait vizsgálják, hanem a környezetet is, ez pedig azt jelenti, hogy minden adott ahhoz, hogy az elektronika ne csak reagáljon a kialakult helyzetre, hanem szükség esetén elébe menjen.
Az ACC fejlődésének a történetét 1992-re lehet visszavezetni, a Mitsubishinek volt egy lézer alapú távolságérzékelője, de az első, valóban műszaki elődnek tekinthető radaros megoldást a Mercedes mutatta be 1998-ban. Azóta a radarok nem csak ráfutásgátlóként működnek, hanem a parkolósegédtől kezdve az önvezetésig rengeteg egység támaszkodik rájuk. Az autóiparban ez mostanra alap.
Viszont ami autónál működik, azt egyáltalán nem triviális motorra átültetni, az ABS-nek is tíz év volt, mire egyáltalán megjelent motoron, és utána még tizenöt kellett, mire el is terjedt. Ugyanis motornál a méret és a súly mindig problémát jelent, a BMW K 100 ABS-e még 11 kiló volt, míg mostanra ezt megoldják 80 dekából. Erre a méretcsökkenésre a radaros egységeknél is szükség volt, arról nem is beszélve, hogy egy motorkerékpár irányításában sokkal hangsúlyosabb szereplő a vezető, mint egy autóban. Nem adhatnak akkora hatalmat a gépnek.

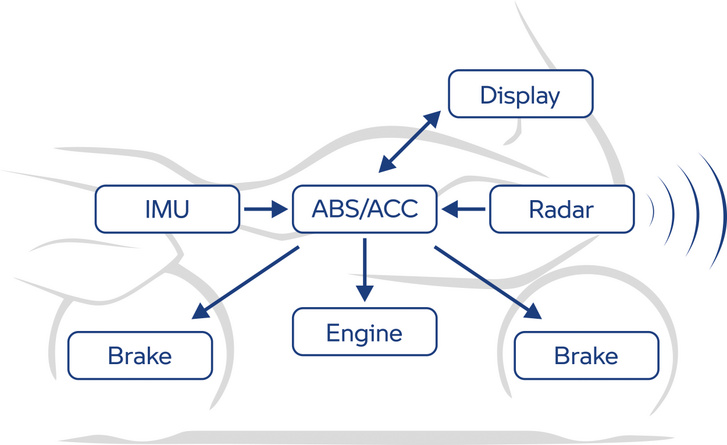
A BMW ACC-jében a radar csak egy elem a sok közül, ugyanis ahhoz, hogy a rendszer biztonságosan működjön, az csak az előző járműtől való távolságot tudja, a programnak viszont szüksége van többek között arra is, hogy a motor mennyi idő alatt teszi meg azt a távolságot - az IMU és a motor összes szenzorja két kézzel szórja az adatokat a CAN buszon keresztül, a részegységek pedig folyamatosan kommunikálnak egymással.
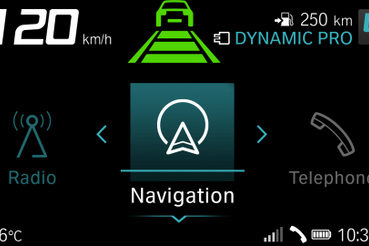
A bal oldali kormánykapcsolóra kerül az ACC gombja, és két üzemmódot kínál: egy comfort és egy dynamic módot - az előbbi nyugodtabb, a másik viszont élénkebb reakciókat enged, például a visszagyorsításnál nagyobb gázt ad. Az ACC 30 és 160 km/h között működik, a követési távolság pedig három fokozatban állítható - a motoros egyébként gázzal vagy fékkel bármikor felülbírálhatja az elektronikát. Az ACC egy dolgot nem tud, amit az autókba épített radaros rendszerek igen: vészfékezni. Ha ilyesmire van szükség, a műszerfalon egy vörös figyelmeztető ikon kezd villogni, de a motor nem avatkozhat be, ez pedig igen logikus, mert motoron egy meglepetésszerű automata vészfékezésnek nagyon csúnya következményei lehetnek.


Mint kiderül, az ACC sem menti meg a motorost a saját hülyeségétől, és egyelőre egy kényelmi extra - nem is azért foglalkozunk ennyit vele, mert ez lenne a motorozás legfontosabb sarokköve, hanem mint az első bekezdésben írtam, maga a technológia az érdekes, amiben elképesztő lehetőségek lapulnak. Arra tippelek, hogy a jövőben ez lesz a motorok fejlesztésének az egyik legérdekesebb területe. Aztán az is lehet, hogy nem, de majd térjünk erre vissza tíz év múlva.